Ausstattung der Fahrstrecke mit Sensoren (Carrera Autorennbahn)
Optische Sensoren der Carrera-Bahn
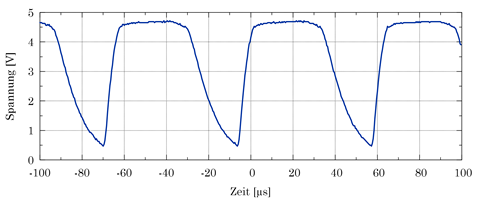
Zur Bestimmung der Position der Fahrzeuge wird eine Rückmeldung von der Carrera-Bahn benötigt, da ein Computer - im Gegensatz zu einem menschlichen Spieler - nicht mit eigenen Augen sehen kann, wo sich ein Auto befindet. Die Bahn verfügt im Original bereits über einige Sensoren, die in der Lage sind, einzelne Fahrzeuge anhand der Nummer des zugeordneten Reglers zu erkennen. Solche Sensoren finden sich z.B. auf der Start-Ziel-Gerade der Control Unit zum Messen der Rundenzeiten oder bei Spurwechseln zum Schalten der Weiche. Der Vorteil dieser Sensoren ist die Fähigkeit, Autos zu identifizieren. Dazu sendet jedes Fahrzeug mit Hilfe einer LED am Unterboden ein Lichtsignal mit definierter Frequenz. Die Frequenz des Signals ist abhängig von der Nummer des zugewiesenen Reglers. In der Abbildung 1 sind einige Signalbeispiele zu sehen.
 |
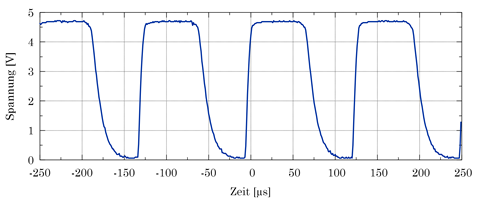 |
| (a) Regler 1 | (b) Regler 2 |
 |
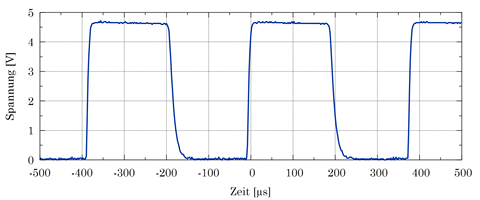 |
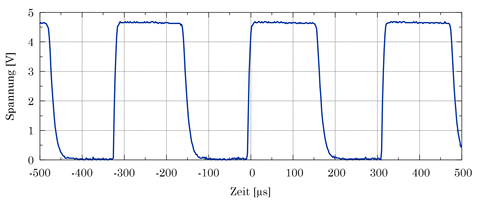
| (c) Regler 5 | (d) Regler 6 |
| Abbildung 1: Kennungen eines Fahrzeuge bei Zuordnung zu unterschiedlichen Reglern | |
Unter Berücksichtigung der maximalen Taktfrequenz von 8 MHz, des in den Dekodern der Autos eingesetzten Mikrokontrollers ATmega8L, lassen sich daraus die idealisierten Signaldaten für die restlichen Fahrzeugkennungen ableiten (siehe Tabelle 1).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Tabelle 1: Kennungen eines Fahrzeuge bei Zuordnung zu unterschiedlichen Reglern | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ausstattung der Fahrstrecke mit Positionssensoren
Wir haben die Strecke mit weiteren optischen Sensoren erweitert, um die Position der Fahrzeuge genauer bestimmen zu können. Dabei ist allerdings zu beachten, dass man mehrere Fahrzeuge als Ghost Car programmieren kann und diese dann alle die gleiche Kennung nutzen. Das heißt, unterschiedliche Ghost Cars lassen sich mit den optischen Sensoren nicht auseinanderhalten! In der Abbildung 2 ist die Verteilung der Positionssensoren auf der Bahn zu erkennen.
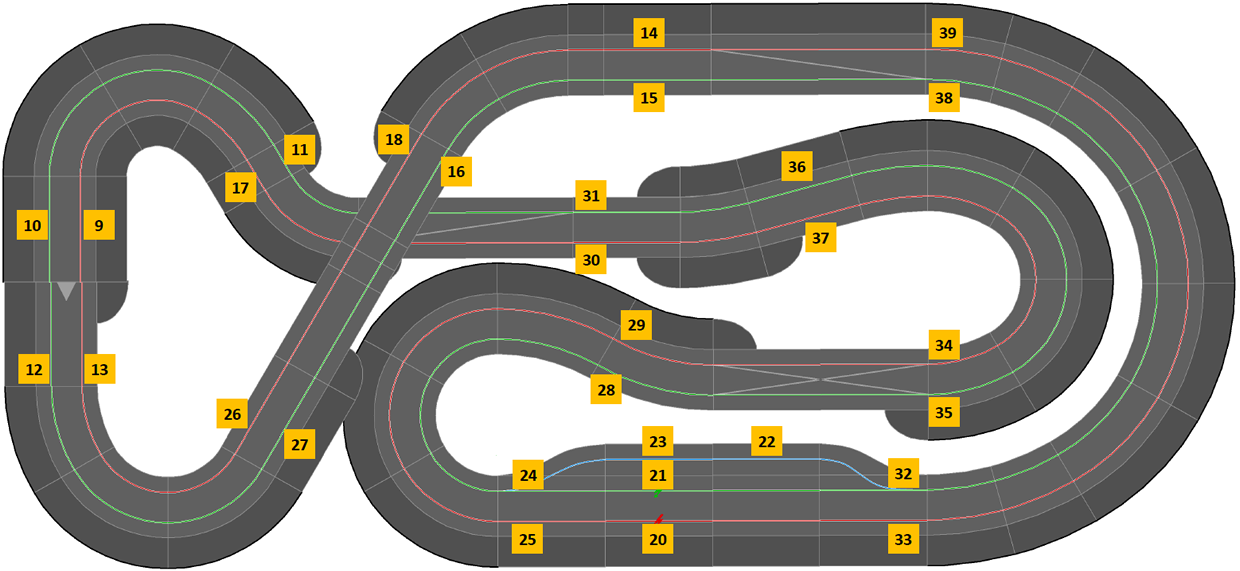 |
| Abbildung 2: Verteilung der optischen Sensoren auf der Bahn |
Hardware-Erweiterungen für die Positionsbestimmung
Für die Erfassung der Fahrzeugposition wurde eine zentrale Platine, auf der sich hauptsächlich ein Mikrokontroller (ATxmega128A3) zur Dekodierung der Sensorsignale befindet, und sternförmig verteilte optische Sensoren eingesetzt. Der Anschluss der Sensoren erfolgt über Flachbandkabel unter den Schienen. Die optischen Sensoren basieren auf Fototransistoren vom Typ SFH309FA. Deren Signalspannung wird über Bipolartransistoren in Kollektorschaltung ausgekoppelt, die mit ihrem geringen Ausgangswiderstand den Signalpegel auf denVerbindungskabeln zum Mikrokontroller treiben. An den Eingängen der Mikrokontrollerplatine befinden sich Komperatoren, die für eine höhere Flankensteilheit der Sensorsignale und eine Anpassung der Spannungspegel von 5V auf 3,3V sorgen.
Dokumentation
- optische Sensoren
- Schaltplan
- Platinenlayout (Oberseite, Unterseite)
- Mikrokontrollerplatine
- Schaltplan
- Platinenlayout (Oberseite, Unterseite)
Verarbeitung der Positionsdaten
Die Daten der Positionssensoren werden von einem Mikrokontroller ATxmega128A3 verarbeitet. Der Mikrokontroller bezieht seine Betriebsspannung über die Carrera-Bahn und kann auf diese Weise auch die Signale, die die Steuereinheit (Black Box oder Central Unit) für die Autos zusammenstellt, empfangen und auswerten.