Handregler der Carrera-Bahn (Carrera Autorennbahn)
Für die Carrera-Bahnen Digital 132 und Digital 124 werden drei Typen von Handreglern angeboten:
- Kabelgebundene Handregler
- Kabellose Handregler
- Optische Datenübertragung (Infrarot)
- Funkdatenübertragung (2,4 GHz)
Die kabelgebundenen Handregler übertragen eine analoge Steuerspannung zur Control Unit oder Black Box; die Empfangsstationen der kabellosen Handregler eine digitale Steuerinformation.
Handregler mit analoger Steuerspannung
Kabelgebundene Handregler nutzen vier der sechs Kontakte im Stecker zur Steuereinheit. Pin 2 führt das Bezugspotential (Masse). Über Pin 3 gelangt die Betriebsspannung auf den Fahrregler. Die Fahrspannung wird am Schleifer des Schiebereglers abgegriffen und über Pin 5 zur Steuereinheit geleitet. Innerhalb der Steuereinheit wird Pin 5 mit einem Widerstandswert von 100kΩ auf das Bezugspotential gezogen. Pin 4 liegt über einen Ziehwiderstand auf 5V und dient zur Erkennung der Tasterbetätigung (Abbildung 1).
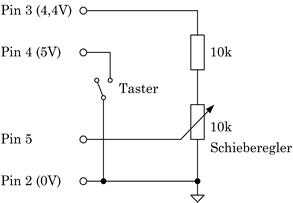 |
| Abbildung 1: Schaltbild eines kabelgebundenen Handreglers |
Die aktuelle Fahrspannung ergibt sich aus dem eingestellten Widerstandsverhältnis und liegt typischerweise zwischen 0V (Schleifer auf Bezugspotential) und 2,1V (Schleifer am Anschluss des Festwiderstandes). Bei der Berechnung ist der Widerstand in der Steuereinheit und der genaue Wert der Betriebsspannung – hier 4,4V – zu beachten. Da die Betriebsspannung über eine Diode von der stabilisierten 5V-Spannung abgegriffen wird, sind in Abhägigkeit der Flussspannung der Diode Abweichungen von dem in Abbildung 1 dargestellten Wert möglich.
Berücksichtigt man weiterhin die möglichen Toleranzen handelsüblicher Bauelemente – Schieberegler: ±20%, Kohleschichtwiderstände: ±5% und SMD-Widerstände: ±1% – dann kann der Maximalwert der Fahrspannung zwischen 1,82V und 2,33V schwanken. Dabei wurde angenommen, dass der Festwiderstand im Handregler ein Kohleschichtwiderstand und der Ziehwiderstand in der Steuereinheit ein SMD-Widertsand ist.
Schließt man an einer Control Unit am Anschluss "Tower 1" einen Empfänger für Handregler mit Funkübertragung (Wireless+ Empfänger) an, sinkt die Betriebsspannung eines kabelgebundenen Handreglers am Anschluss "Tower 2" auf 4,2V. Unter diesen Bedingungen ist mit einem Maximalwert der Fahrspannung zwischen 1,74V und 2,23V zu rechnen.
Im praktischen Test lieferten zwei Exemplare dieser Handregler einen Minimalwert zwischen 0,9mV und 6,5mVsowie einen Maximalwert zwischen 1,83V und 1,85V bei 4,4V Betriebsspannung bzw. 1,76V bis 1,77V bei einer Betriebsspannung von 4,2V.
Handregler mit digtalen Steuerinformationen
Für beide Arten von kabellosen Handreglern wird das gleiche Protokoll für die Übertragung der digitalen Steuerinformationen benutzt. Unter [1] findet man eine Beschreibung für neuere und ältere Infrarot-Empfänger. Die älteren Empfänger können mit vier Handreglern betrieben werden; die neueren mit sechs. Für die Übertagung der Signale werden die beiden, von den kabelgebundenen Reglern unbenutzten, Pins des Anschlusssteckers verwendet. Das Synchronisationssignal von der Steuereinheit wird auf Pin 6 gesendet und die Steuerinformationen des Empfängers der Handregler auf Pin 1.
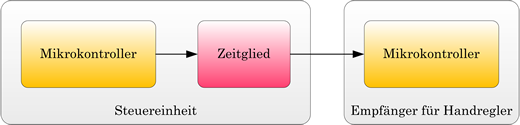
Die Steuereinheit der Carrera-Bahn unterscheidet bei der Synchronisation mit dem Empfänger eines kabellosen Handreglers nicht zwischen den beiden Übertragungstypen, obwohl die Anforderungen an die jeweilige Datenübertragung sehr unterschiedlich sind. Dadurch erscheint der Aufwand für die Erzeugung des Synchronisationssignals sehr hoch. Abbildung 2 zeigt die Prinzipschaltung am Beispiel eines Empfängers für Handregler mit Funkübertragung (Wireless+ Empfänger).
 |
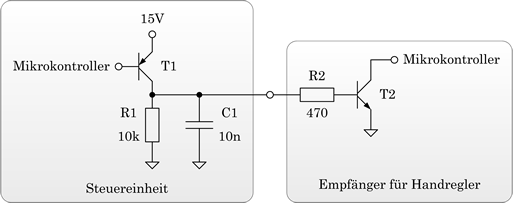 |
| (a) Blockschaltbild | (b) Skizze der Schaltung |
| Abbildung 2: Erzeugung des Synchronisationssignals | |
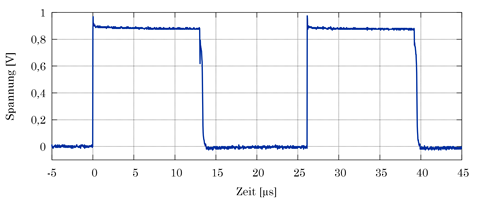
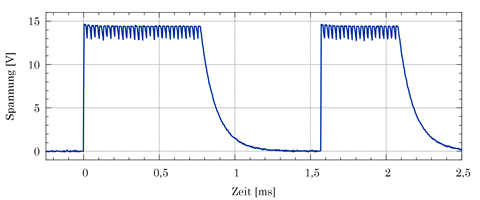
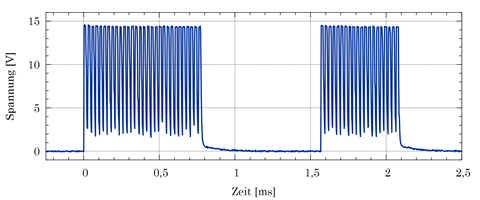
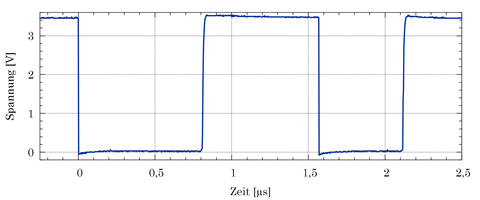
Der Mikrokontroller in der Steuereinheit erzeugt zur Synchronisation ein Signal mit einer Periodendauer von 26,125µs – etwa 38,3kHz (Abbildung 3a). Dieses Signal wird für 30 Periodendauern gesendet (783,75µs); dann für 30 Periodendauern abgeschaltet und danach noch einmal für 20 Periodendauern gesendet (522.5µs). Das gesamte Synchronisationssignal benötigt damit 2,09ms. Bei einer Infrarot-Datenübertragung ist ein solches gepulstes Signal notwendig, um beim Empfänger die gesendeten Daten von Einflüssen des Umgebungslichtes zu trennen - beim Funkempfänger eigentlich nicht.
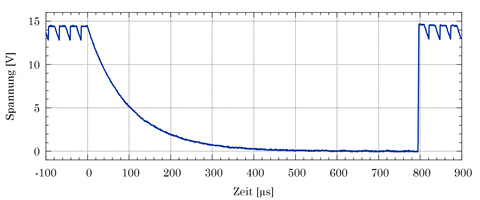
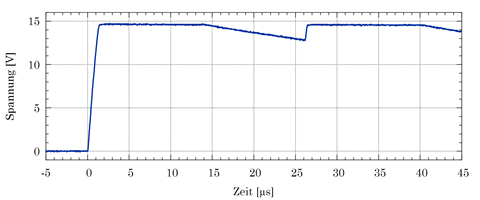
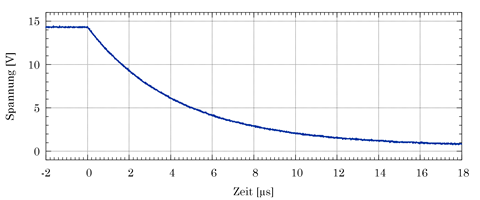
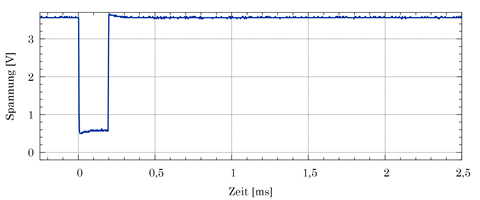
Dieses Signal passiert in der Steuereinheit ein RC-Zeitglied, dass ohne den angesteckten Empfänger für die Handregler eine Zeitkonstante τ = R1• C1 von 100µs aufweist (Abbildungen 2b und 3b). Am Ausgang der Steuereinheit erscheinen die kurzen Impulspausen des Synchronisationssignals nur noch als geringe Spannungsschwankungen, da sich der Kondensator C1 nur langsam über den Widerstand R1 entlädt (Abbildungen 2b, 3c und 3d).
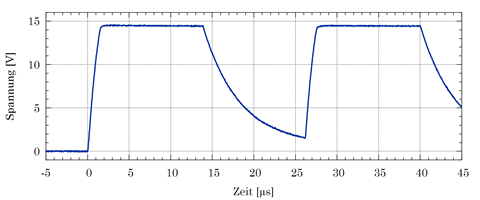
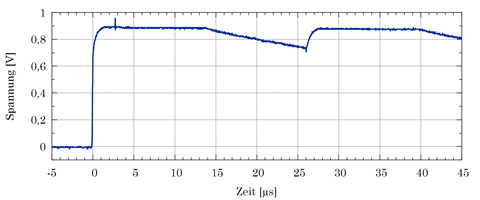
Steckt man den Empfänger für die Handregler, wird der Widerstand R2 über die Basis-Emitter-Diode des Transistors T2 parallel zum Widerstand R1 geschaltet. Aufgrund der großen Differenz der beiden Widerstände bestimmt R2 maßgeblich die Zeitkonstante des Zeitgliedes. Ihr Wert liegt nun bei etwa 4,7µs (Abbildung 3h). Allerdings ist die Zeitkonstante noch immer zu groß, um den Kondensator C1 innerhalb der Impulspausen vollständig zu entladen (Abbildungen 3e und 3f). Er behält eine Restladung von etwa 1,5V. Das führt dazu, dass die Basis-Emitter-Spannung des Transistors T2 immer oberhalb von 0,7V liegt (Abbildung 3g), der Transistor damit eingeschaltet und seine Kollektorspannung auf 0V bleibt (Abbildungen 3i und 3j).
 |
 |
| (a) Ausgang des Mikrokontrollers in der Steuereinheit (Black Box) | (b) Zeitkonstante des RC-Gliedes ohne dem externen Empfänger |
 |
 |
| (c) Ausgang der Steuereinheit ohne dem externen Empfänger (gedehnt) | (d) Ausgang der Steuereinheit ohne dem externen Empfänger (komplett) |
 |
 |
| (e) Ausgang der Steuereinheit mit dem externen Empfänger (gedehnt) | (f) Ausgang der Steuereinheit mit dem externen Empfänger (komplett) |
 |
 |
| (g) Eingang des externen Empfängers (gedehnt) | (h) Zeitkonstante des RC-Gliedes mit dem externen Empfänger |
 |
 |
| (i) Eingang des Mikrokontrollers im externen Empfänger (gedehnt) | (j) Eingang des Mikrokontrollers im externen Empfänger (komplett) |
| Abbildung 3: Synchronisationssignal zwischen der Steuereinheit und dem Empfänger für die kabellosen Handregler | |
Während der Impulsdauer pumpt die Steuereinheit einen Strom von 29,8mA in die Basis des Transistors T2. In der Impulspause geht dieser bis auf 1,7mA zurück. Würde man den Eingang des Funkempfängers hochohmiger gestalten, ließe sich der Steuerstrom und damit auch die notwendige Steuerleistung deutlich senken.
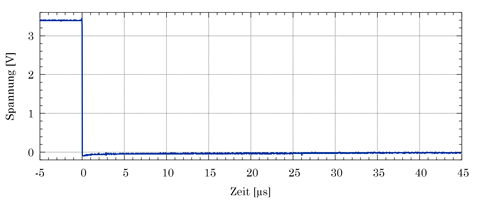
Der Funkempfänger antwortet auf das Synchronisationssignal der Steuereinheit mit einem 192µs langem Low-Impuls auf Pin 1 (Abbildung 4). Der Antwortimpuls beginnt direkt nach der ersten steigenden Flanke des Synchronisationssignals.
|
| (a) Synchronisationssignal der Steuereinheit |
 |
| (b) Antwort des Empfängers für die kabellosen Handregler |
| Abbildung 4: Synchronisation von Steuereinheit und externem Empfänger |
Verweise
| [1] | Slotbaer / Carrera Digital 124/132 / D132 & D124 Infrarot-Regler-Protokoll; Online: http://www.slotbaer.de/index.php/carrera-digital-124-132/13-d132-d124-infrarot-regler-protokoll |
|---|